 .
.
A Crash Course In Collisions: The CBDR Rule
Marc Green
Overview: This page discusses human factors analysis of the two most common road accident scenarios, longitudinal and lateral collisions. The CBDR rule is the basic concept needed to understand these scenarios and why they differ. It explains how collision geometry determines: 1) the task that drivers must perform to avoid accidents and 2) the likely causes of the crash when they do not. Finally, the CBDR rule is useful but has limitations.
Collision analysis usually starts by determining the point of impact. It next works backward from time 0 and locates the colliding objects -0.5, -1.0, -1.5, etc. seconds before impact. The goal is to determine the information available to the driver in the moments prior to the crash. This information does not originate directly from the scene, but rather from the scene's projection onto the driver's retina, where it is initially represented by the image's location, motion, and size on the 2D retina. The collision geometry specifies all of these factors.
Geometries fall into two broad classes, lateral and longitudinal. As discussed in Green (2024), the two collision types differ in many significant ways, most notably the driver's task and the main cause of crashes. Driving involves two main mental tasks, detection, and prediction. Detection failure causes most lateral collisions while prediction failure causes most longitudinal collisions. Further, lateral geometries have both tangential motion and motion-in-depth toward the eye. However, research suggests that the motion-in-depth plays little role in prediction in lateral geometries. In contrast, longitudinal cases have only motion-in-depth, so it is the only retinal information available for prediction.
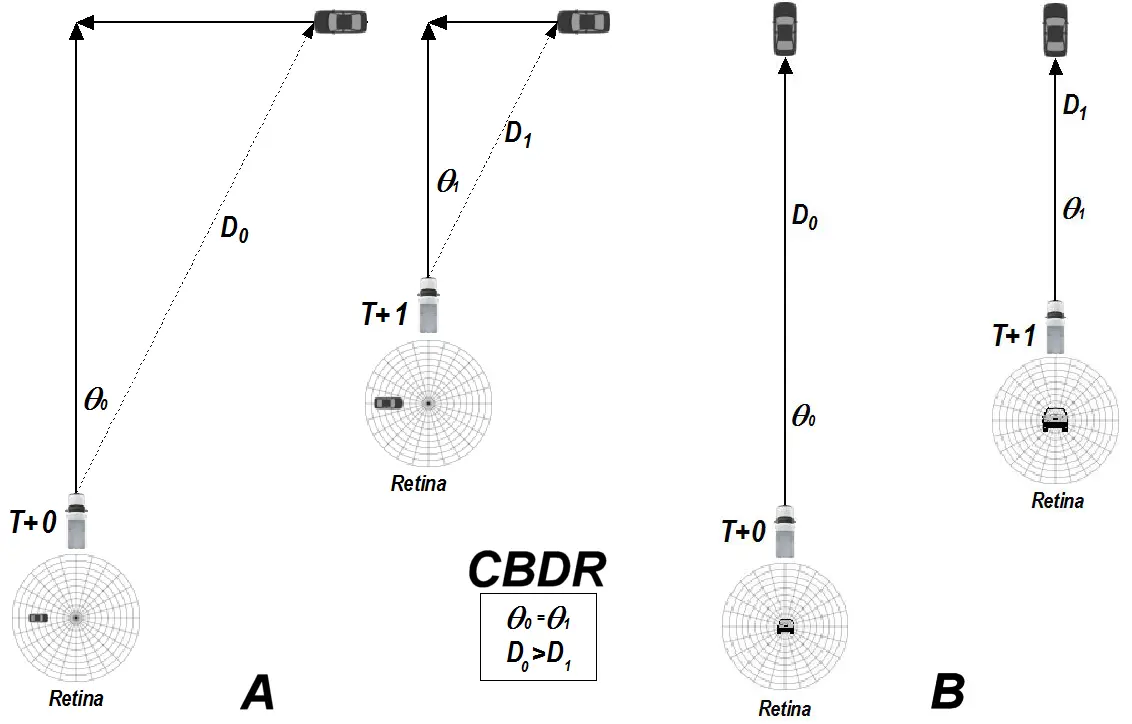
Figure 1 Lateral (A) and longitudinal (B) CBDR. In both cases, the bearing angle remains constant and there is no significant retinal slip. In lateral cases, however, there may a dramatic slip in the final second before collision.
Lateral Collisions
A lateral collision (Figure 1A) occurs when the approaching vehicle cuts across the driver's path. The main visual characteristics are the object's location in the peripheral field and its tangential motion, i.e., cutting across the driver sightline. The approaching vehicle is located at a bearing angle relative to the driver's direction of travel. If the driver is looking straight ahead, then the approaching vehicle will create an image at a "retinal eccentricity" (angle relative to the eye's sightline) almost equal to the bearing angle. The disparity between the bearing angle and retinal eccentricity has important consequences, as described below.
The bearing angle, and hence retinal eccentricity, depend on relative speed. The bearing angle is the tan-1(approaching vehicle speed/driver's vehicle speed). If both vehicles travel at the same speed, then the angle is 45o. If the approaching vehicle is traveling faster or the driver traveling slower, then the angle is greater. For example, if the driver is traveling 45 mph and the approaching vehicle is traveling 60 mph, then the bearing angle is tan-1(60/45)=53o. If the driver is traveling slower at 30 mph then the bearing angle is tan-1(60/30)=63o. These eccentricities are all in far peripheral vision. The situation reverses for the approaching driver. Since the angle is 90o, then that driver must avoid a collision with a vehicle that has only a bearing angle of 90-63=27o. The faster driver will always have the smaller bearing angle to the other vehicle.
If the vehicles continue to approach at constant speed, something interesting happens, or to be more precise, doesn't happen (Figure 1A). The scenarios at time T and T+1 are "similar triangles", those having lengths of different sides but the same angles. As a result, the bearing angle remains constant as distance shrinks right up to the moment of collision.
Although largely unappreciated in road collision analyses, this scenario is so well known in aviation and maritime piloting that it even has its own name: "constant bearing, decreasing range" or CBDR. For example, Farwell's Rules of the Nautical Road (Allen, 2005) says that CBDR is "the time-honored method for determining the spatial component of risk of collision." Note that the constant bearing, the CB, only says that a collision will happen if range decreases, but it doesn't say when it will happen. That information is coded in the DR part, the decreasing range. This is more important for longitudinal collision avoidance, as discussed below.
The CBDR geometry is important because it has several implications for collision avoidance:
1. Drivers have ready access to the information needed to predict lateral collisions.
2. Drivers need not make any speed or distance judgments, skills at which humans have limited ability. Accurate speed perception depends on knowing depth, but the human retina is 2D, and the depth dimension is not represented. Without knowing distance, it is impossible to judge speed. This is explained on the jumbo jet illusion page.
3. The approaching vehicle is likely to be located quite far into the peripheral retina. The bearing angle grows as approaching vehicle speed increases. Faster approaching vehicles are located farther from the sightline and should be more difficult to see due to poorer peripheral vision and to the increased likelihood of some obstruction. At the same time, faster approaching vehicles also create more violent and injurious collisions.
4. The retinal image remains stationary on the driver's retina. There is no "retinal slip" to signal motion and to provide conspicuity.
This predicts that an approaching object should be least noticeable in a CBDR scenario. In other words, drivers are least likely to see approaching objects
when they are on a collision path.
Research has confirmed this prediction. This fact is so well known in the animal research literature that it has its own name, "motion camouflage."
In sum, the most hazardous approaching objects—those traveling fast in a CBDR—are the most
difficult to detect. How's that for irony.
5. At night, the critical bearing angle is not necessarily between the object and the vehicle's path, but between the object and the vehicle's headlamp aim. If the approaching object is a pedestrian, for example, then the bearing angle with respect to the headlamp aim must be considered. Headlamps aim rightward. This means that pedestrians approaching from the left will be farther from the beam aim and less detectable, which many studies have demonstrated. However, pedestrians are relatively slow moving and typically have smaller bearing angles than vehicles. Bicycles bearing angles fall somewhere in between those of vehicles and pedestrians. See more here.
6. As might be expected, the major cause of lateral collisions is the driver's failure to notice the approaching vehicle. Studies typically find that about 80% of lateral collisions are due to detection failure. This is hardly surprising since the retinal image is in the visual periphery. However, physical obstructions cause a significant collision percentage as high as 16% with factors such icy roads also causing others. Prediction failure is relatively rare.
Variations
So far, the CBDR rule has been described as a collision between 1) the front bumpers of vehicles 2) traveling linear paths 3) at constant speed 4) on roads intersecting at 90o 5) while the driver looks straight ahead. While this is a common scenario, there are several possible variations, some making a significant difference and some not.
Approach angle. Figure 1A shows a 90o collision, but roads may cross at another angle. Fortunately, the CBDR rule is not restricted to right-angles. While most roads intersect at or near a right angle because designers prefer them for safety reasons, the CBDR rule also equally to applies acute or obtuse intersection angles. The calculation needed to determine the bearing angle is more complicated than the simple inverse tangent of relative speed. The angle is determined by solving a side-angle-side triangle, which requires using the Law of Sines and Law Of Cosines (not to be confused with the Cosine Law). See Green (2024).
Point of impact. Not all collisions are bumper-to-bumper. Real collisions may involve a side impact of one vehicle with the other. For example, assume that an approaching vehicle comes from the right. The driver collides with its rear panel 12 feet from the front bumper. This scenario is not precisely a CBDR, as the bearing angle of the approaching vehicle's front bumper does not remain quite constant, causing the retinal eccentricity to change and creating some retinal slip. However, the scenario closely approximates a CBDR because the 12 feet from bumper to point of impact is initially small compared to the approaching vehicle's range. As the vehicle approaches, the bearing angle and retinal eccentricity decrease marginally and very slowly until about the last second when the approaching vehicle's range is short. It then sharply falls to 0 (the approaching vehicle's bumper is straight ahead) and begins to grow in the opposite direction as the vehicle's front bumper passes in front of the driver to the left. If the approaching vehicle T-bones the driver, then bearing angle instead grows sharply at the last moment and never reaches zero.
Driver eye position. The driver's eyes are usually back 6-8 feet from the front bumper. If the goal is to determine the driver's retinal image, then the critical angle is the "retinal eccentricity", the bearing angle with the eye (sightline) rather than with the front bumper. Using the front bumper angles then introduces some error. The effect is initially negligible since the 6-8 feet eye-bumper distance is small compared to the approaching vehicle distance. There is a gradual decline in bearing angle and a small amount of retinal slip. A second or less before impact when distance is short, the retinal eccentricity goes into a nose dive while the bumper bearing angle remains unchanged. This is doubtless one reason why drivers so often only detect an object on a collision path just prior to or simultaneously with impact—until then, the object was in peripheral vision. See further discussion here.
Angle of gaze. The driver's angle of gaze can be critical. The bearing angle and retinal eccentricity become uncoupled when the driver turns his gaze. Two scenarios are common. In one, the driver sees the approaching vehicle, foveates and tracks it. The retinal eccentricity is then zero (with no retinal slip), so a detection failure is less likely. This still leaves the problem of predicting that a collision will occur. However, the driver can still use the CBDR rule to predict the collision. The bearing angle information is coded in three pieces of information: 1) the retinal eccentricity, 2) the angle of the eyes with respect to the head, and 3) the angle of the head with respect to the torso. Since the brain keeps track of all three quantities, the driver can still determine the bearing angle and use the CBDR rule to predict a collision, even while tracking.
In the other scenario, the driver looks leftward or rightward to fixate another object in the scene as he travels forward. Imagine a driver looking down the road and seeing a pedestrian standing on the left sidewalk at an intersection ahead. Since the driver is looking leftward, a vehicle approaching from the right will have a retinal eccentricity greater than the bearing angle. The driver is less likely to see the approaching vehicle than when looking straight ahead. Further, the driver will have to turn his gaze increasingly leftward to fixate the pedestrian as distance decreases. (Rate of eye turn increases as distance to the pedestrian shrinks.) The retinal eccentricity then grows over time making detection even less likely as TTC decreases. Conversely, a driver looking rightward can create two scenarios. As the driver moves toward the fixed point, his gaze turns increasingly rightward. If he starts with a gaze angle less than the bearing angle, then the retinal eccentricity shrinks (sightline moves closer to the vehicle) and detection probability increases over time. Depending on the fixation point, the approaching vehicle might eventually intersect the driver's sightline. If the gaze angle is initially greater than the bearing angle, then the continuing rightward eye movement causes the sightline to move away from the approaching vehicle which becomes less detectable. (If this is unclear, try drawing a diagram.)
Acceleration/deceleration. The CBDR rule's major limitation is that it only applies to objects traveling a linear path at constant speed. If one of the vehicles decelerates or accelerates, the bearing angle changes. As a result, collisions can occur even when the bearing angle is variable, a VBDR scenario. Depending on the relative acceleration/deceleration between vehicles, any number of scenarios are possible and collision may well occur in scenarios of VBDR. Such cases tend to be dangerous because humans are relatively poor at judging second-order variables such as acceleration. However, drivers could still use bearing angle in an avoidance strategy. They need only modulate speed to maintain a constant bearing angle (CBA) with a gap in the traffic, which is equivalent to causing a "collision" with the gap (e.g., Louveton, Montagne, Berthelon, & Bootsma, 2012).
Nonlinear path. Both vehicles must be traveling on straight paths. The bearing angle changes when either vehicle is traveling a nonlinear route, again creating a VBDR. For a driver traveling straight, an approaching vehicle on a convex curved path decreases in bearing angle and creates retinal motion toward the fovea. Despite the better opportunity for detection, drivers still tend to be poorer at judging collisions when vehicle approaches are curved. As curves become shallower, however, the geometry begins to increasingly resemble a CBDR.
Longitudinal Collisions
Longitudinal geometries occur when the approaching vehicle travels straight toward the eye, i.e., rear-end and head-on cases (Figure 1B). Motion is purely in depth with no tangential component. These have been discussed elsewhere, but they still fall within the CBDR framework: the bearing angle remains constant (at 0), but the range decreases. In many ways, avoiding longitudinal collisions is the inverse task of avoiding lateral ones. Since the approaching object is directly ahead and forms an image on the fovea, detection is seldom an issue. (The main exceptions are dark vehicles/pedestrians on the roadway at night and drivers who are looking away from the roadway.) Instead, the main longitudinal task is prediction. It is a CBDR so a collision will occur if range decreases, but remember the CB alone doesn't say when it will occur. Instead, the driver must perceive the range. More precisely, the driver must perceive the range's rate of change or something similar such as time-to-collision (TTC).
There are two ways to make the prediction and to properly judge motion-in-depth. Both must overcome a fundamental limitation: the world appears 3D, but the retinal image is only 2D. One of the most basic questions in visual perception is how humans are still able to perceive 3D despite the 2D retina. That is, the 3D world projects its image on to the 2D retina, so the Z-axis depth dimension is lost.1 This problem is especially important in collision analysis since the driver must judge change in depth (range) accurately to avoid having a crash.
One solution is "indirect perception" using 2D pictorial depth cues to construct an internal 3D model of space. That might provide range, but the driver really needs to know whether the range is decreasing. Drivers can infer range change by judging depth at time T and then later at time T+1. Theoretically, they can then also judge the rate of approach by dividing the range change by time. However, drivers are very poor at this task. The 3D model is merely an inference and is crude, slow, inexact and prone to error. At best, it reveals only the sign of the change: + (overtaking), - (falling farther behind) or 0 (staying a constant distance behind). Drivers cannot use depth cues to obtain specific information about the rate of change, the TTC or the urgency of response. Moreover, the JND for perceiving a change in distance is about .12 in research subjects, so the update rate is slow. (A car 500 feet ahead would have to change range to 440 feet. If overtake speed is 15 mph, then it would take almost three seconds before the range change would be noticeable.) However, spatial information from depth cues has one advantage. Although most depth cues lose their effectiveness with distance, some monocular/pictorial cues are still available at very long range.
The alternate solution is to use direct perception of looming, the rate of retinal image growth, or of some derivative such as tau, inverse tau or tau dot. Unfortunately, the looming can only be recognized by perceiving the outward edge motion of the growing image. When an object is even moderately far away, the growth motion is too slow to perceive. It only becomes perceptible at shorter ranges.
In sum, there are two ways of judging the change in range: 1) spatial information which is crude, slow and inexact but which is available at long range and 2) retinal image growth information which is fast and exact but which is available only at short range. Both have advantages and disadvantages. The deficiencies of spatial information are generally no problem in normal driving, so long as the distance is great. If a driver sees a vehicle far ahead on the freeway, then spatial information is likely to be sufficient. Overtaking generally occurs gradually so there is plenty of time to update the range change. The driver can use the categorical, spatial information to plan and to respond. When the lead vehicle is unexpectedly slow or stopped, or when range is very short, then using spatial information is inadequate. The driver must shift to the fast and accurate image growth information. The problem is that it is only available once the motion threshold of the image growth (looming) is reached. However, the driver must then interpret looming (or inverse tau) signal (or possibly some other optical variable such as tau or tau dot), which takes significant time. Real drivers do not respond at looming threshold, but only later when the looming rate is much higher and the interpretation is clearer (Markkula, Engström, Lodin, Bärgman, & Victor; Green, 2020).
TTP Geometries
There is also a class of collision geometries which superficially appear to be lateral but which are really longitudinal. The prototypical case occurs when a driver halts at an intersection with a STOP sign, looks down the road and sees a vehicle approaching on the crossing road. In this case, the approaching vehicle is not on a collision course with the driver. He doesn't judge time-to-collision (TTC), but instead, he judges time-to-passage (TTP) at the point where paths would cross.
Geographically, this appears to be a lateral geometry because the vehicle is approaching from the side. From the driver's perspective, however, it is longitudinal. The stopped driver looks down the road to the approaching vehicle. Unlike the basic longitudinal geometry, the approaching vehicle is not quite coming straight toward the driver's eye but rather toward a point in the roadway a few feet ahead. At long distance, however, this approach angle is close to, but not quite, zero. For example, when the vehicle is 300 feet away and will pass a point 15 feet ahead of the driver, the angle between the driver's eye and the approaching vehicle path is tan-1 (15/300)=2.9o. The motion is almost entirely in depth with minimal tangential component. When the vehicle comes much closer, the angle begins to grow (e.g., 11.3o at 75 feet) and the tangential motion increases. Since the driver must make the "go" decision when the vehicle is relatively far away, however, approach angle is almost always small at the critical moment, and the driver is judging the DR as in a longitudinal scenario—based on motion-in-depth. Judging the TTC and TTP are similar problems with almost the same visual geometry. Again, research supports this assumption.
The driver again can use either space or optics (looming or inverse tau) to judge TTP and gap size. If the vehicle is within looming range, he can use retinal image growth to judge gap size. Otherwise, he will have to use distance. In fact, many studies show that drivers determine safe gap size by judging distance combined with an implicit assumption that the approaching vehicle is traveling at about the speed limit. This is especially likely when the approaching object is beyond looming threshold range. Unfortunately, a very fast vehicle arrives sooner than expected, and collision risk is substantial. Motorcycles are especially prone to such collisions both because their small size makes the looming detection distance very short and because they tend to travel at very high speeds well over the speed limit (e.g., Clabaux, Brenac, Perrin, Magnin, Canu & Van Elslande, 2012).
A similar scenario occurs when a driver is stopped or approaching an intersection and wanting to make a left-hand turn. He must judge the TTP of an oncoming vehicle that is traveling almost, but not quite, straight toward the eye.
Conclusion
The article has made two basic points. First, collisions fall into two fundamentally different geometries, lateral and longitudinal. This distinction is important because it differentiates between tasks that the driver must perform and the most likely causes of collision. Second, the most useful way to classify and to analyze collisions is based on the retinal image location, slip velocity and size—the factors that affect detection and prediction. Although the simple rear-end, head-on, STOP sign and left turn cases seem different in an accident reconstruction diagram, for example, they are really the same longitudinal geometry from the driver's viewpoint. Lastly, this article has addressed only sensory factors in collision and collision avoidance. Cognitive factors such as expectation, beliefs about vehicle kinematics, location of action boundaries and accepted field-zone ratio also affect driver behavior (Green, 2024).
Footnotes
1No, stereoscopic depth is not the answer. Close one eye. Does depth disappear? Moreover, photographs show depth, even though there can be no retinal disparity. Stereo only provides absolute depth information within peripersonal space, perhaps six feet from the eye. At longer distances it provides relative information depth that is primarily used to isolate surfaces in tasks such as figure-ground segregation and to define surface shape.
A division of 2057949 Ontario, Inc.
Copyright © 2024 Marc Green, Ph. D.
Home Page
Contact Us







A division of 2057949 Ontario, Inc.
Copyright © 2024 Marc Green, Ph. D.
Home Page
Contact Us
![]()
![]()
![]()
![]()
![]()
![]()
![]()